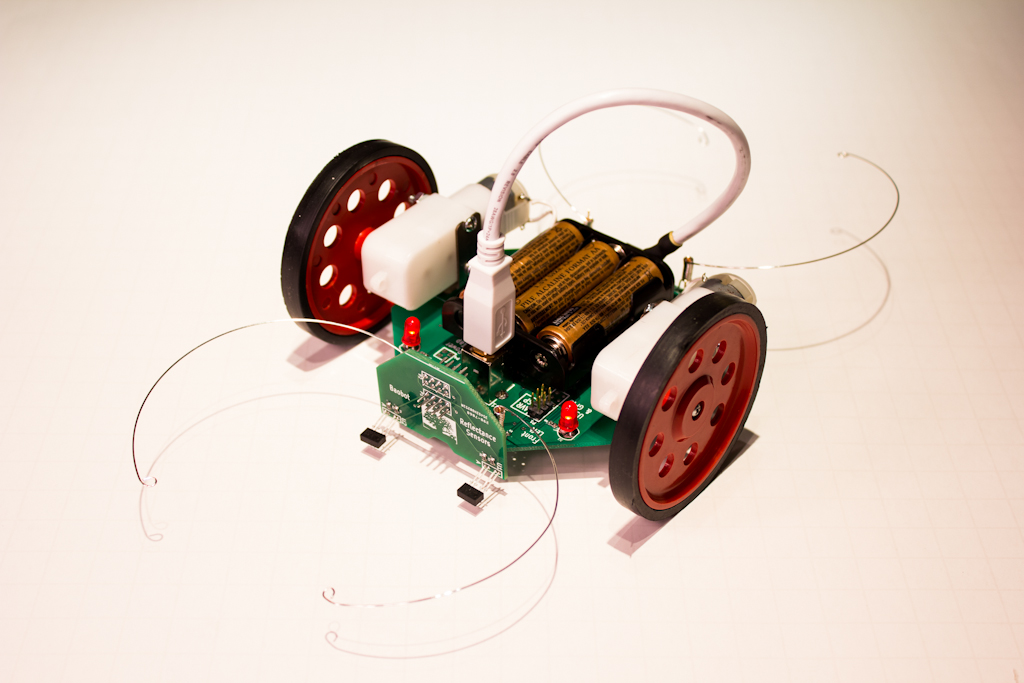
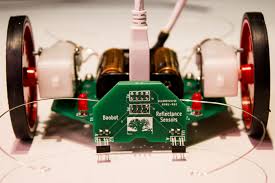
Baobot
Baobot es capaz de un control USB con cable (a través de la consola serie) y el control autónomo. En el modo autónomo, el robot va a dar vueltas hasta que uno de los bigotes son golpeados. Si se golpea un pelo delante, el robot retrocede, gira a la izquierda oa la derecha, y se mueve hacia delante de nuevo. Si un pelo trasera es golpeado mientras se mueve hacia atrás, el robot se mueve hacia adelante. Una línea que sigue placa del sensor opcional se puede añadir a la parte delantera, lo que permite que el robot siga una línea oscura sobre un fondo claro.





